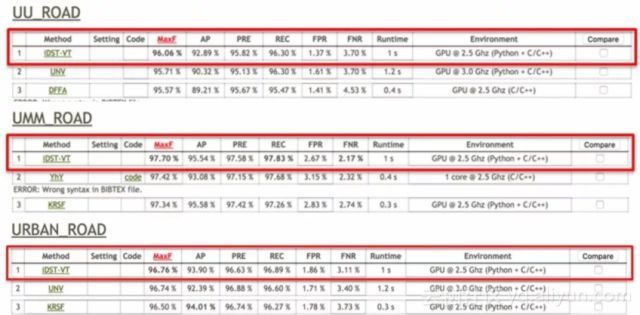
| 继机器阅读理解打破世界纪录、精准率首次超越人类之后,阿里巴巴再传喜讯:夺道路场景分割任务世界级技术第一,与自动驾驶紧密相关。 在国际最大的自动驾驶计算机视觉算法集KITTI中,阿里一举囊括三项道路场景分割任务第一,包括UMM_ROAD(多车道)与UU_ROAD(乡村车道)两项特定场景评测任务,及整体场景的综合评测任务URBAN_ROAD。
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是国际公认的最大自动驾驶计算机算法评测数据集。 多样性是KITTI数据集的最大特点,涵盖城市、住宅区、道路、校园、行人等五大场景,采用更适合自动驾驶的BEV视角评价方式,包含众多难度较大的无标识线道路,是自动驾驶技术研发必选的调测平台。 道路场景分割在自动驾驶领域至关重要,主要应用在自动驾驶中的可行驶区域划分、自动驾驶路径规划、高精地图构建以及辅助驾驶的AR导航。 大多数自动驾驶研究机构都能做到对城市道路的大块分割,但对于边缘路面,例如路岩石、车辆沿路停靠等还存在很大识别难度。如何把道路边缘分割的更为精细,是目前的主要攻坚方向。
由机器视觉科学家任小枫带领的视觉技术团队提出基于在线难样本挖掘的网络学习方法,同时在网络中增加在线数据增强模块,及全局特征、局部特征融合机制,提升网络特征的表征能力与推广能力,解决道路分割问题中的道路边沿与车辆周围路面分割不准确、阴影干扰等问题。 最终以96.06%、97.70%的分割准确率分别获得UU_ROAD(乡村车道)、UMM_ROAD(多车道)两项特定场景评测任务第一,96.76%的准确率获整个道路场景分割综合评测任务URBAN_ROAD第一。这也是阿里巴巴首次出现在KITTI道路场景分割的排行榜上。 作为一家被电商掩盖光芒的科技公司,阿里巴巴的科研能力正在强势崛起,并尤为强调对基础科学的研究投入。此前曾成立探索人类科技未来的实验室“达摩院”,计划在三年内对新技术投资超过1000亿人民币,用于涵盖基础科学和颠覆式技术创新的研究。 阿里巴巴长期占据KITTI的车辆检测世界冠军,近日还获得行人检测项目第一,在计算机视觉国际顶级期刊和会议TIP、ACM MM等发表多篇论文,与世界分享中国技术。 阿里巴巴正在成为全球顶尖科技人才回流的第一站。去年6月,计算机视觉顶级科学家任小枫加入阿里,随后世界级量子科学家施尧耘、声学专家冯津伟等相继加盟,在阿里的丰富场景下探索人类的领先技术。 -END- ID:yunqiinsight |